前天五四青年节提前下班,回家迫不及待的把我的四轴拿出去飞了下,毫无悬念,炸鸡了。损失不是太大,脚架断了一根,电调一个电感坏了,去网上买了根16mm碳纤管、22uh电感,等到货了再修理下。
炸鸡主要有以下几点导致的:
– 四个电机电调没有校准好,转速不太一致
– 飞控的水平没有校准好,导致飞的时候老是往一边偏
– 没有合适的长地,不太敢飞,忽高忽低,操作不方便,以后去空旷的地方比较好
月度归档: 2018 年 5 月
组四轴无人机总结
最近组装了个四轴无人机,轴距650mm,负载4KG+,踩了一些坑,分享下。
基本组成:
- 机架:飞越650
- 电机:朗宇380KV
- 电调:好赢40A
- 飞控:PixHawk
- GPS:Ublox M8N
- 桨:1555碳纤桨
- 桨座:快拆桨座
- 电池:6S 10000MAH
- 遥控器:FrSky X7
- 接收机:FrSky X8R
- 充电器:B6平衡充
- 信号线:22AWG硅胶线
- 电源线:14AWEG硅胶线
- 接头:2.54mm镀金杜邦端子、杜邦外壳,XT60公头、母头
- 焊接工具:烙铁或吹焊机、松香、焊锡、镊子(如果用烙铁买大功率点,不然焊接头不太容易)
- 辅助设备:万用表、螺丝刀、剥线器、剪刀、钳子、皮筋(绑在钳子上可以固定接头)
- 辅助材料:魔术贴(捆绑设备、电池)、尼龙扎带、热缩管、3M双面胶
- 螺丝:M2 M2.5 M3螺丝,长度不定,不确定螺丝内径可以用游标卡尺或千分尺测量,也可用细线绕10圈测量,普通尺子不行
- 电流计:非必须
- 数传:非必须
- OSD:非必须
- 图传:非必须
- 空速计:非必须
注意事项
- 玩航模很烧钱很费时间,效果还可能不理想,还可能不让在家周围飞,量力而行
- 国内电子设备假货泛滥,低端仿制很多,注意辨别,尤其是飞控、GPS这种设备
- 提前设计好设备的安装位置和线长,保证机架整洁,强迫症可以忽略
- 飞控最后安装,提前调试好,不然要来回拆卸
- 调试指南针的时候远离一起可能干扰源,不然结果是不准确的
- 注意安全,不到最后一步万万不可安装螺旋桨,非常危险,安装的时候注意正反桨
- 多学习,多看文档,国内社区水平不高建议看国外论坛
附录
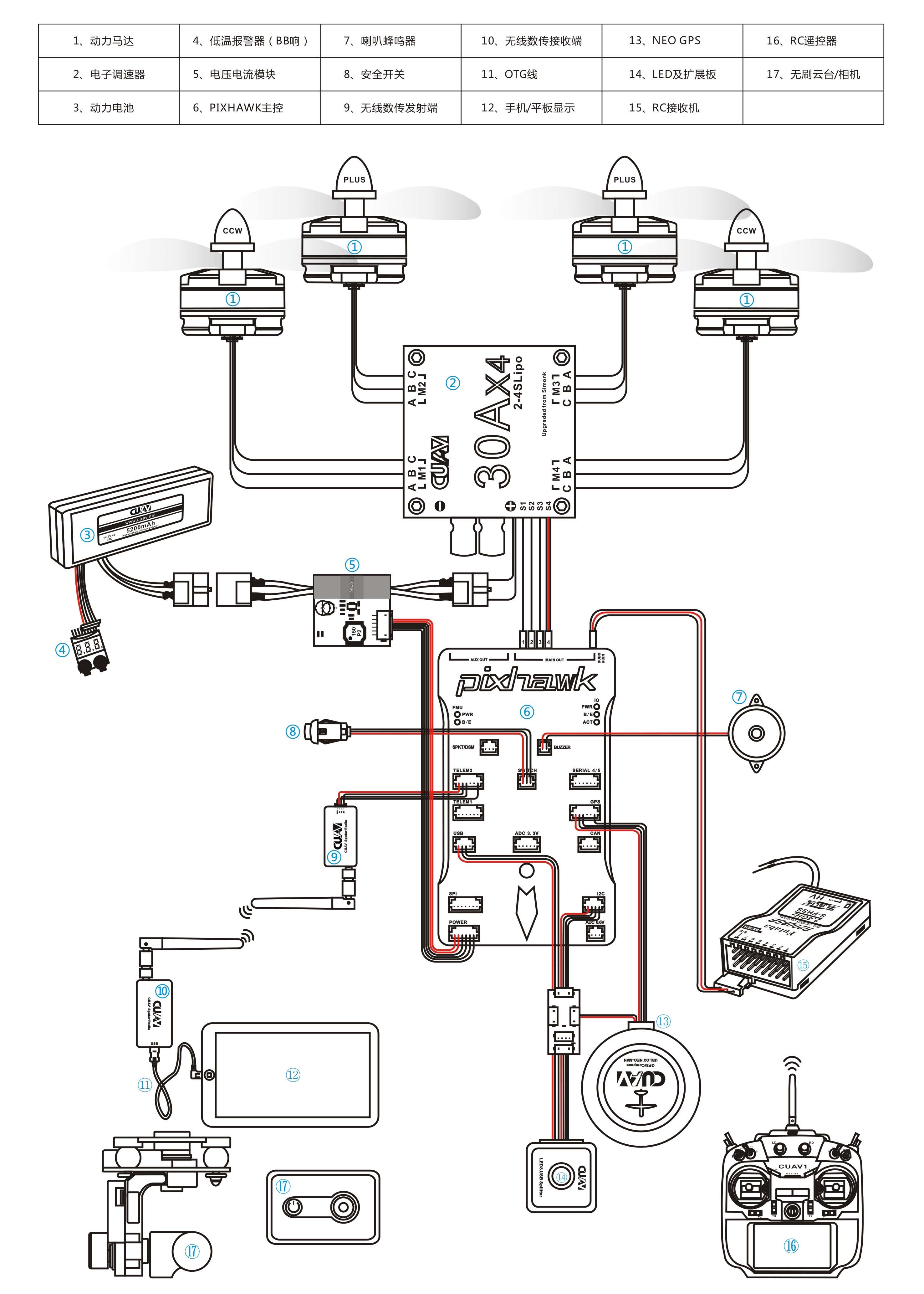
PixHawk飞控接线图
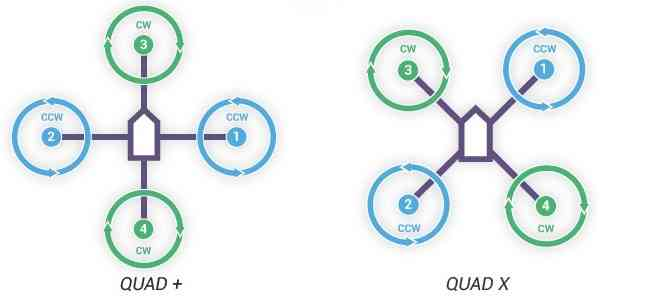
飞机选装方向与桨叶的安装
- CW 顺时针螺旋桨,绿色图示
- CCW逆时针螺旋桨 ,蓝色图示
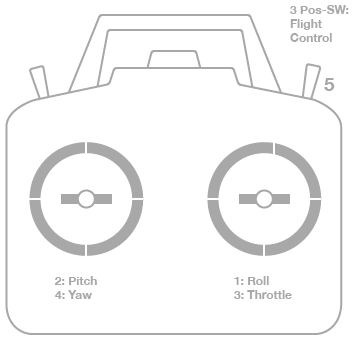
遥控器控制类型
遥控器常见的一共有2个控制模式:
– Model1 日本手:左边的摇杆控制 Pitch俯仰 和 YAW方向,右边的摇杆控制 Throttle油门和ROLL横滚
– Model2 美国手:左边的摇杆控制 Throttle油门 和YAW方向,右边的摇杆控制 Pitch俯仰和ROLL横滚
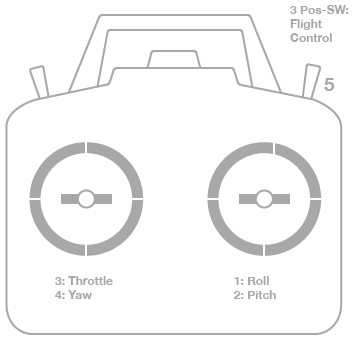
YAW 偏航是绕Z轴旋转 Pitch是俯仰绕Y轴旋转,ROLL横滚绕X轴旋转(X轴为飞机前进方向)
解锁飞行器
- 在解锁之前,请确保在一个空旷无人的环境进行测试,以免出现意外情况。
- 详细检查硬件安装是否正确(特别是电调插线、飞行器固件、螺旋桨方向),确认没有问题之后,执行以下步骤
- 打开你的遥控器发射机
- 将电池插入到飞行器。飞控状态灯应该是红色蓝色交替闪烁(自检过程),自检中不要移动飞行器
- Pre-Arm将自动运行,正常自检后,会 闪烁 蓝色灯 或者 绿色灯, 说明Pre-arm无错误,可以解锁。如果 闪烁黄色灯 ,请参照上一个章节 Pre-Arm 报错信息分析 指南进行排除错误
- 设置正确模式 :将模式设置为 增稳Stabilize、 定高ATLhold 或者定点Loiter(需要室外GPS锁定) 新手推荐使用增稳或者定高
- 解锁安全开关: 长按解锁安全开关,直到安全LED常亮状态(闪烁为锁定不输出pwm信号,常亮为解锁输出pwm信号)
- 解锁遥控器:将遥控器油门打到最低,YAW方向达到最右,保持10秒,RGB状态灯会红蓝交替闪烁,完成解锁,松开YAW
- 成功解锁:螺旋桨将怠速旋转起来,看起来是有点恐怖,但是这个一个安全设置,提醒已经成功解锁。可以通过MOT_SPIN_ARMED参数调整速度或者为0关闭
- 起飞:推高油门起飞,并根据姿态去控制方向(如果新手不熟悉控制,可以先去练习飞行模拟器,以免出现炸鸡而造成人员和财产损失)
- 如果解锁后,15秒内无任何操作,将会自动上锁,解锁后在未起飞的状态下,理想的姿态跟实际姿态相差过大会自动上锁(如大幅度打roll杆或者用手晃动飞行器)
上锁飞行器
上锁飞行器执行以下操作:
– 检查你的飞行模式开关设置为 Stabilize增稳 、定高 AltHold 或者 定点 Loiter
– 油门保持最低和方向YAW最左 (与解锁反方向)
– 按住 安全开关-直到闪烁
– 拔掉飞行器电池
– 关闭遥控器发射机